Aggancia - sgancia
Esercitazione con robot LEGO EV3
Aprile 2020
In questa esercitazione il robot ha il compito di agganciare il “cubotto” con il cestello anteriore, spostarlo indietro, sganciarlo e rientrare a 10cm dal parcheggio.
Si utilizzerà solo il sensore di distanza ad ultrasuoni posizionato davanti per rivelare la presenza del cubotto ad una distanza non inferiore a 7cm prima dell’aggancio ed infine per rivelare il muro ad una distanza non inferiore a 10cm per effettuare il parcheggio.
Oltre ai due motori grandi B+C per il movimento delle due ruote, si utilizzerà il motore medio A per abbassare il cestello in fase di aggancio e successivamente per sollevarlo per liberare il cubotto dopo averlo spostato.
Il programma prevede l’inserimento di altri comandi come il timer, suono ed altri movimenti per favorire la riuscita dell’operazione.
Di seguito si mostra il programma a blocchi di comando con dei commenti al di sopra dei blocchi e la lista dettagliata delle operazioni.
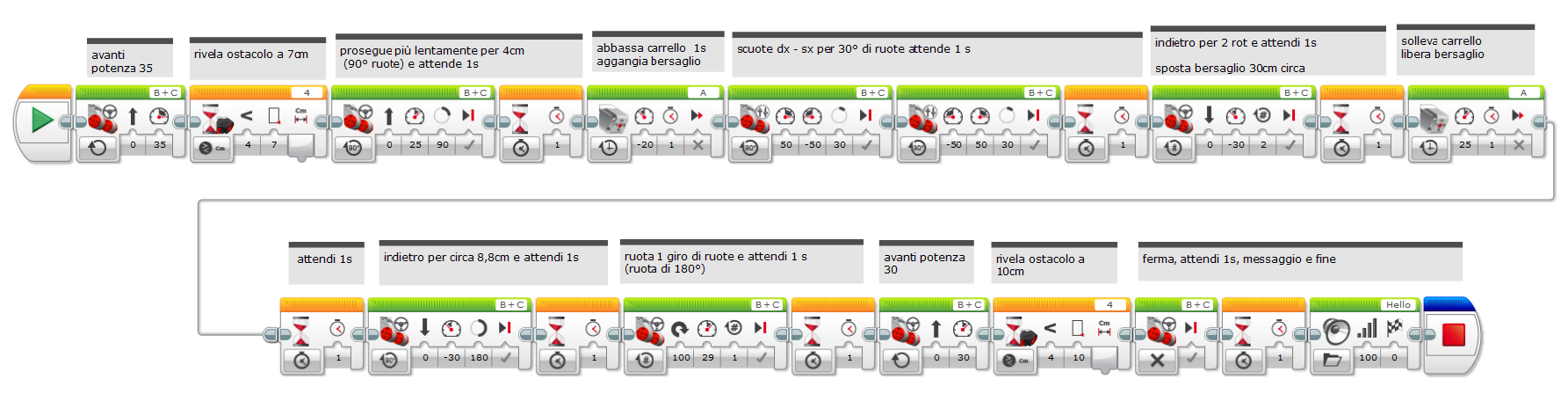
1) Il robot si muove in avanti con potenza 35%;
2) Se il sensore ad ultrasuoni rivela un ostacolo (cubotto) ad una distanza inferiore a 7cm
3) Prosegue più lentamente con potenza 25% per 4cm (90° ruote, cioè ¼ di giro) e si ferma;
4) Il timer consente un’attesa di 1s;
5) Si abbassa lentamente il cestello azionando il motore A con potenza negativa -20% per 1s calcolato sperimentalmente affinché il cestello abbracci il cubotto;
6) e 7) Il robot viene pilotato come cingolato con rotazione a destra e poi a sinistra di 30° su se stesso per ciascun movimento per garantire il sicuro aggancio del cubotto;
8) attesa di 1s;
9) spostamento indietro di 2 rotazioni (poco più di 35cm) con potenza -30% e poi si arresta;
10) attesa di 1s;
11) Solleva il cestello per liberare il cubotto azionando il motore medio A con il 25% di potenza per 1s;
12) Attesa 1s;
13) Indietro di circa 9cm (180°, mezzo giro) con potenza -30%;
14) Attesa 1s;
15) Massima sterzata (100) con potenza 29 per un giro completo di ruote che imprime al robot una rotazione di 180°;
16) Avanti con potenza 30%;
17) e 18) Rivela ostacolo (muro del parcheggio) e si ferma entro 10cm;
19) e 20) attesa di 1s ed emissione del suono “Hello”.