Esercitazione con robot LEGO EV3
Avanti-indietro: 3 cicli
a cura del prof. Giuseppe Spalierno – aprile 2020
In questa esercitazione si attivano due sensori: uno di contatto posto in avanti ed un sensore di luce che guarda il pavimento.
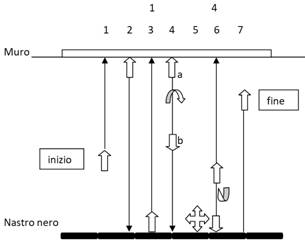
Il robot è programmato per muoversi da un nastro adesivo nero posto sul pavimento, trasversalmente alla direzione di marcia, ad un muro che si para davanti al robot in movimento secondo le seguenti sette sequenze:
1) Avanti con potenza 50%, quando si giunge al muro l’interruttore si attiva, ferma il motore ed emette un suono;
2) Retromarcia con potenza -50% fino al nastro nero, si ferma ed emette un altro suono;
3) Come 1;
4) Retromarcia di 15cm. circa, rotazione di 180°, fermo 1s, avanti fino al nastro nero, stop e suono;
5) Oscilla da dx a sx di 45° per 4 volte;
6) Come 4;
7) Avanti, a 15 cm dal muro stop e terzo suono.
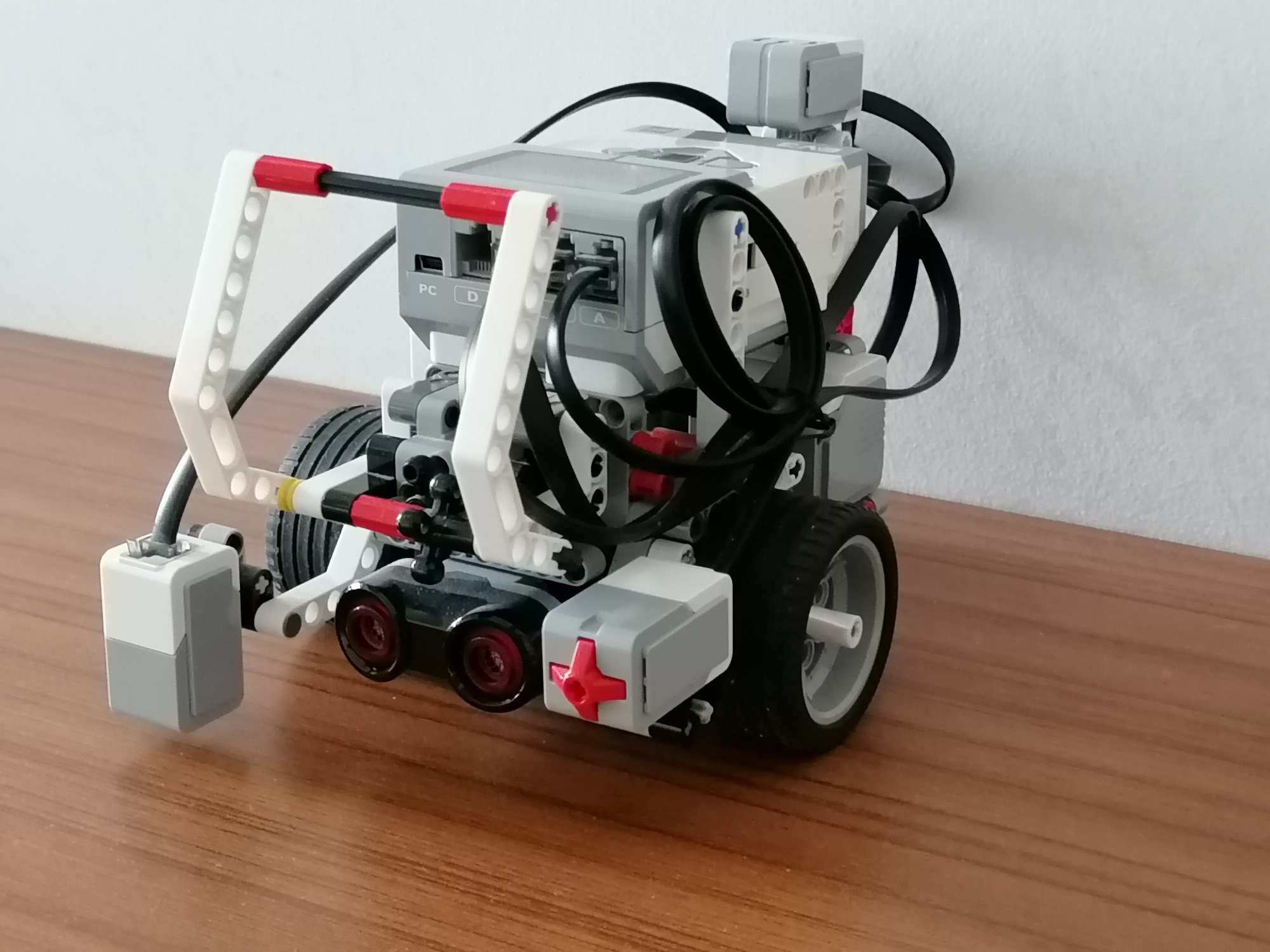
In figura si mostra il robot LEGO EV3. Si nota a sinistra il sensore di luce puntato verso il basso e a destra il sensore di contatto col pulsante rosso situato in avanti. Al centro, con i suoi due occhietti, il sensore di distanza ad ultrasuoni, non utilizzato in questa esercitazione.
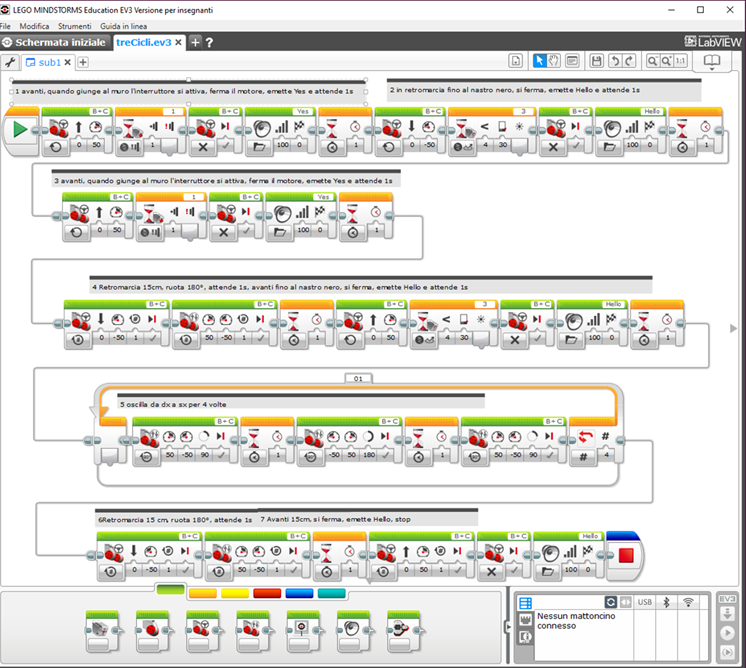
In basso si mostra la lunga sequenza di comandi per ottenere le specifiche richieste